设备概况
管道内FBE补口机器人专业应用于钢管内焊缝表面FBE喷涂作业;其结构由行走、定位、除锈、清扫、空压气泵、喷涂和控制等七个部分组成;行走系统可控制设备在管道内沿正或反方向爬行;定位系统采用摄像头定位装置,操作人员通过控制箱上监控器可直观、准确、方便地确定要补口补伤的位置;除锈和清扫系统可对将要补口的位置进行除锈和清理作业;空压气路有空压泵、储气罐以及气路组成,通过气压调节可将粉末沸腾,并通过管路输送到喷嘴;供料系统由流化料仓和粉嘴组成,通过调节气压可将粉末雾化,并均匀喷涂在管壁上;整套设备以PLC为核心控制部件,在完成基本操作参数设定后,设备将会在补口过程中自动完成表面清理和涂敷的工艺过程。
主要技术参数
|
机器人型号
|
YQD-Ⅰ
|
|
管径范围
|
DN400及以上
|
|
进管深度
|
≤60米
|
|
行走速度
|
0-10米/分钟
|
|
爬坡能力
|
≤10°
|
|
定位精度
|
±10mm
|
|
除锈、喷涂范围
|
≤400mm
|
|
除锈等级
|
Sa2.5
|
|
空气压力
|
≥0.5MPa
|
|
单次喷涂厚度
|
≥300μm
|
|
工作电源电压
|
DC 48V
|
LE补口机器人工作方式
1、将FBE补口机器人根据管径大小调节轮距,使喷嘴和抛头位于钢管中心;
2、将设备通电,根据工艺要求对PLC设置工艺参数,保证PLC按工艺要求自动化操作;
3、将放入已焊接待补口的管段,并爬行至该管段最末端的焊缝处;
4、通过机器人自带摄像头进行焊缝定位;
5、通过机器人自带抛丸除锈装置对焊缝内表面进行抛丸除锈,并清理焊接衍生物及拉毛新旧涂层搭接面;
6、通过机器人自带摄像头对焊缝表面除锈质量进行外观检查;
7、机器人退行中,通过自带摄像头再次进行焊缝定位;
8、定位好后,钢管外壁进行中频加热;
9、钢壁达到规定温度后,对焊缝内表面进行喷涂补口;
10、通过机器人自带摄像头对焊缝表面喷涂质量进行外观检查;
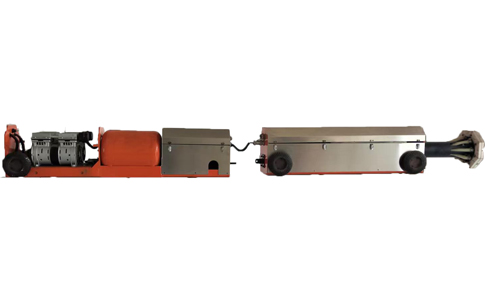
设备图片